

Summary
- DFKI-led consortium presented an AI-supported underwater welding robot for maritime maintenance.
- The system combines an underwater robot arm, sensors, and AI to find joints and plan weld paths.
- It uses an underwater flux-cored arc welding approach with continuous wire to support stable, repeatable seams.
A research consortium led by DFKI says it has developed a new underwater welding robot to reduce the need for repair work to be done only by professional industrial divers. The project is called MARIOW (Maritime AI-Guided & Remote Operated Welding), and it targets repairs on port facilities, offshore structures, and other maritime metal structures.
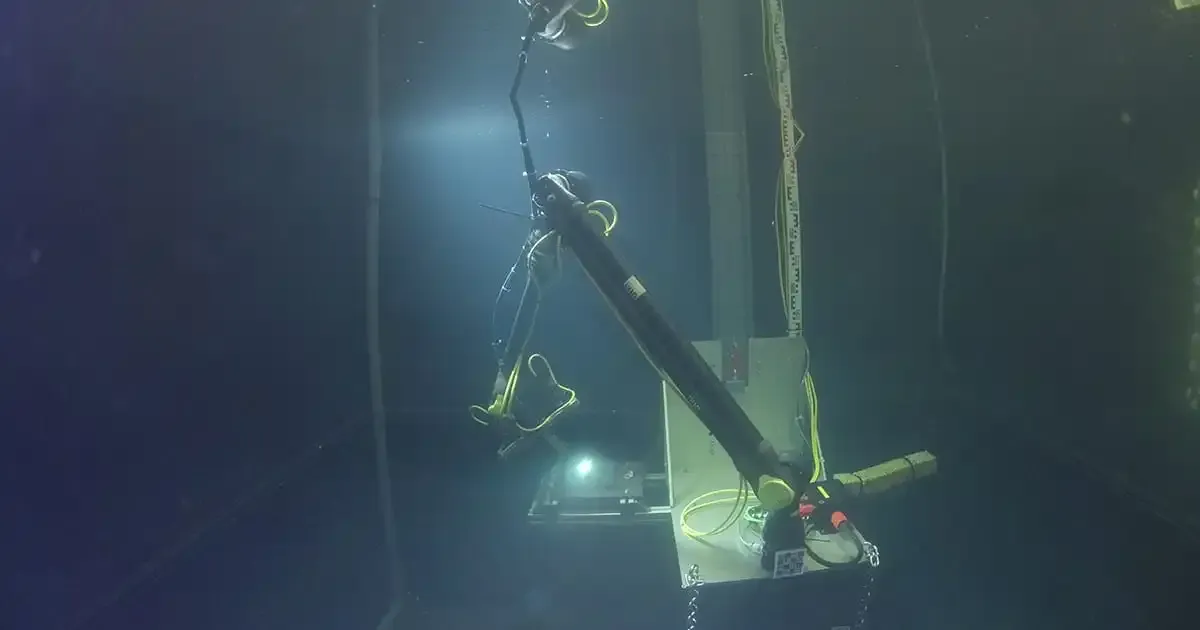
At the core is a modular underwater manipulator from DFKI, described as usable down to 6,000 meters depth with a two-meter reach. For joint detection and path planning, the system uses a stereo camera near the torch and AI models trained to recognize weld joints plus start and end points, then calculate robot motion.
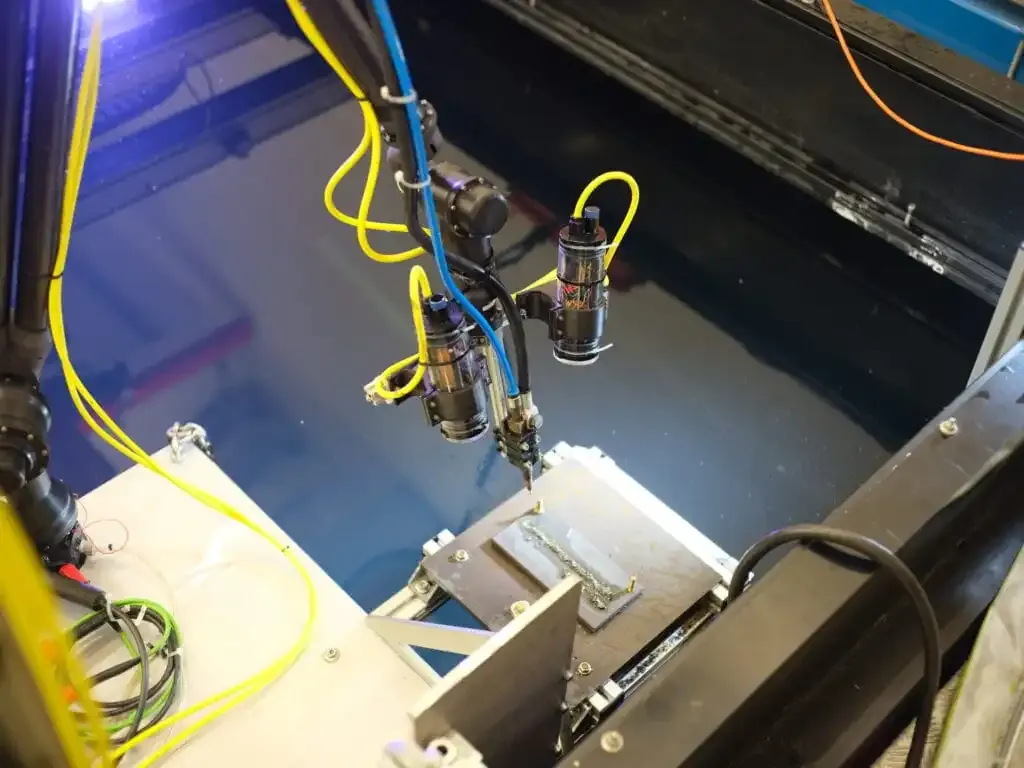
On the welding process side, the partners highlight underwater flux-cored arc welding (UW-FCAW), using continuous wire instead of stick electrodes that must be replaced after short runs. The team reports a successful final demonstration in DFKI’s underwater test basin in Bremen, and says next steps include moving toward real harbor conditions like salt water, currents, and waves.
Source:
Discussion